კეთილი იყოს თქვენი მობრძანება “მოძრავი პლატფორმის” ვებ-გვერდზე. ჩვენი პროექტი მიზნად ისახავს მოძრავი პლათფორმის გამართულად სიარულის და ბრძანებების მიღების უზრუნველყოფას.
კინემატიკა
RosIlia State University
ალეკო მამაციანი
ბექა მაისურაძე
კახა მელაშვილი
სქემის აწყობა და პროტოკოლების გამართვა
სერვერის კოდის დაწერა
ძრავების მიკროპროცესორით მართვა
გიორგი მოდებაძე
დავით ჩხაიძე
პროფესორი
მოწვეული ლექტორი
კეთილი იყოს თქვენი მობრძანება “მოძრავი პლატფორმის” ვებ-გვერდზე. ჩვენი პროექტი მიზნად ისახავს მოძრავი პლათფორმის გამართულად სიარულის და ბრძანებების მიღების უზრუნველყოფას.

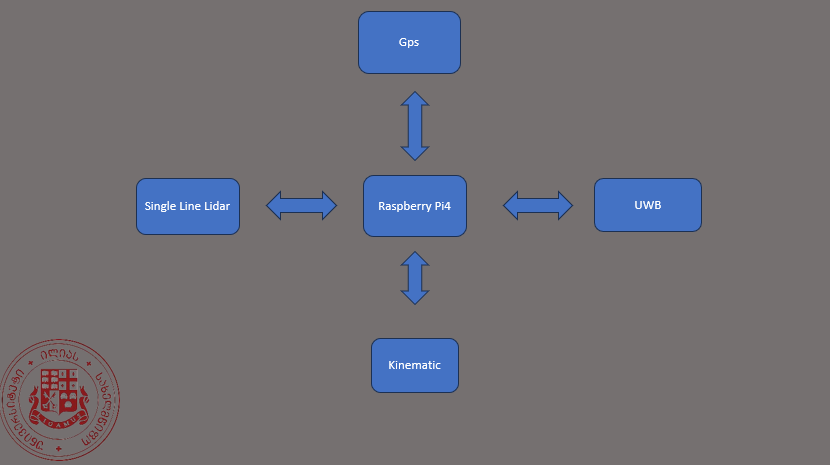
ჩვენს პროექტში გამოვიყენებთ სხვადასხვა მოწყობილობებს: როგორიცაა Raspberry pi 4 და Single line lidar, ასევე ისეთ ნაწილებს როგორიცაა Mecanum Wheels და UWB (Ultra Wide Band)

როგორც ავღნიშნეთ ჩვენი გუნდის მთავარი მიზანია პლატფორმის სიარულის უზრუნველყოფა, თუ ჩვენ გვინდა რომ ეს იყოს შესაძლებელი დაგვჭირდება შემდეგი მოწყობილობები:
Raspberry Pi 4, ეს მიკროკონტროლერი არის ამ პროექტის მთავარი ნაწილი, მისი დახმარებით შეგვიძლია ვუზრუნველყოთ პროექტის ყველა ასპექტის ერთმანეთთან კავშირი
Raspberry Pi 4 აღწურვილია ოთხბირთვიანი ARM Cortex-A72 CPU თი, ეს არის ძალიან ძლიერი, სწრაფი და მარტივად კონტროლირებადი მოწყობილობა რომელიც ამუშავებს ინფორმაციას სწრაფად და უშეცდომოთ
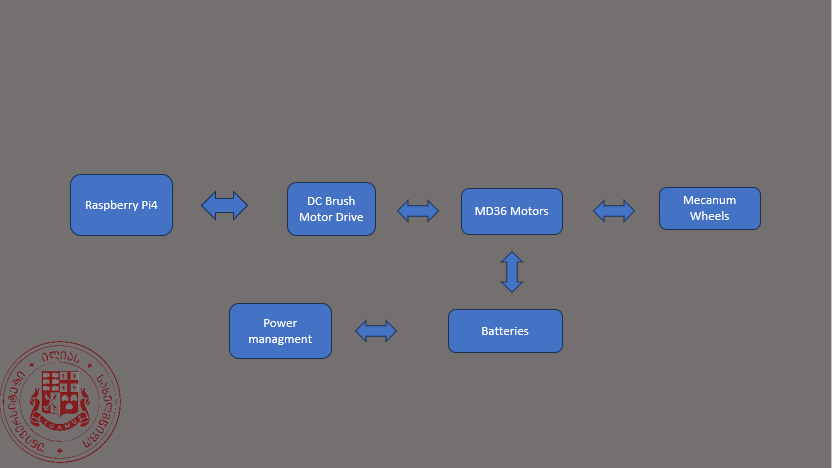
DCDC motor drive გამოიყენება ძრავების კონტროლისთვის,შევძლოთ რომ ძრავებს გადავცეთ საჭირო რაოდენობის ენერგია.
MD36 Encoder Motor, ძრავის მოდელი რომლის გამოყენებაც გადავწყვიტეთ, ამ მოდელს (1 ძრავას ) შეუძლია რომ 13 კილოგრამი დატვირთვა აიტანოს ყოველგვარი პრობლემის გარეშე
Mecanum Wheels, უნიკალური საბურავები, რომლებსაც შეუძლიათ ნებისმიერი მიმართულებით გადაადგილება, მათი დახმარებით არ გახდება საჭირო პლატფორმის მობრუნება და მიმართულების შეცვლა
ამ პროექტით, ჩვენი მიზანია გავაუმჯობესოთ და გავამარტივოთ ლოჯისტიკის რობოტების გადაადგილება და ორიენტაცია, სამომავლოდ, გვსურს გაკეთდეს ისეთი საწყობის მოდელი, სადაც რობოტების გადაადგილება იქნება მარტივი და ეფექტური. რობოტებს არ შეეშლებათ ხელი გადაადგილებაში ან არ შეუშლიან ხელს ერთმანეთს.

კინემატიკის დიაგრამა
პროექტის დიაგრამა


