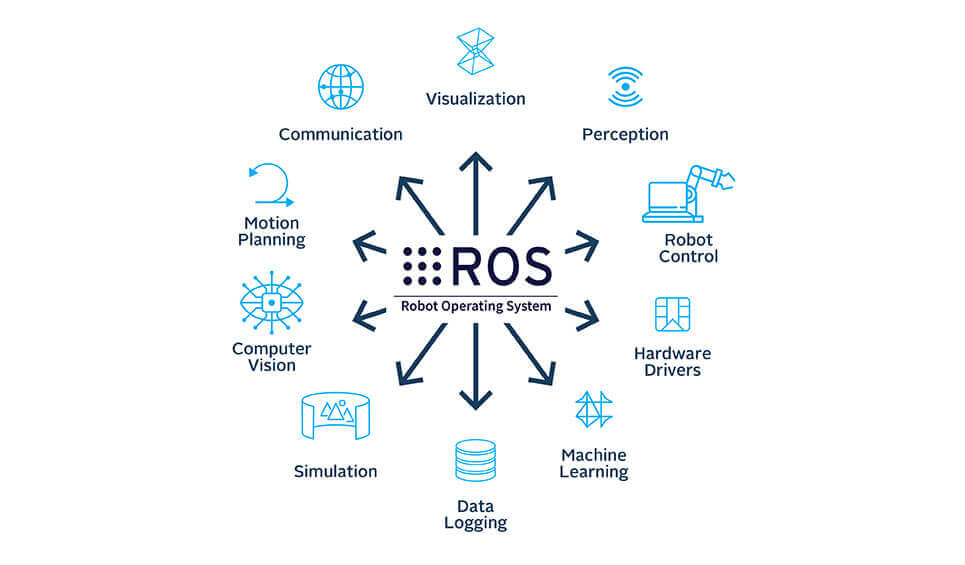
ROS (Robot Operating System) არის სისტემური ბიბლიოთეკებისა და ხელსაწყოების ნაკრები რომელიც შექმნილია რობოტების ასაწყობად. დრაივერებით დაწყებული, რომელიც აუცილებელია რობოტების გასაცოცხლებლად, უახლესი და ყველაზე ეფექტური ალგორითმებით დამთავრებული, რომლების გამოყენება შეგვიძლია ჩვენს ნებისმიერ პროექტში. ეს არ არის ოპერაციული სისტემა რეალურ დროში, მაგრამ შეიძლება ინტეგრირებული იყოს რეალურ დროში გამოთვლით კოდთან.
Ros შეიქმნა 2007 წელს და მის შემდეგ მომხმრებლების და მწარმოებელი კომპანიის ერთიანი შრომის წყალობით უმჯობესდება ყოველ წელს.
2014 წელს კომპანიამ დაანონსა Ros2, 2015 წლის თებერვალში შეიქმნა პირველი პროექტი, ამ მომენტში Ros2 ისევ იყო ალფა ტესტირების სტადიაში, ოფიციალურად კი 2017 წლის 8 დეკემბერს გავრცელდა მთელს მსოფლიოში, ამ ქმედებით Ros მა საფუძველი ჩაუყარა რობოტების მშენებლობის ახალ თაობას.
მთავარი განსხვავება რაც არის Ros სა და Ros2 ში არის შემდეგი: Ros იყენებს Master-slave არქიტექტურას და ასევე XLM-RPC middleware ს. ROS2 იყენებს მონაცემთა დარიგების სერვისს ( Data Distribution Service ( DDS ) ), რომელიც შექმნილია რომ უზრუნველყოს მაღალი ეფექტურობა და საიმედოობა, დაბალი შეყოვნება (latency), მასშტაბურობა და ასევე ხელით გასწორებადი Quality of Service პარამეტრები.